当社の障害物回避アルゴリズムが、日経新聞の誌面と電子版に掲載されました。
これは、微分幾何学の理論に基づくもので、空間内に存在する障害物を回避し、目的物へアプローチすることができるアルゴリズムです。障害物が動いていても安全に回避しながら、目的物へ到達することが可能となります。
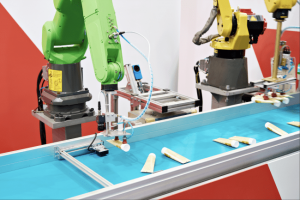
アームロボットやAGVフォークリフトなどの産業ロボット、あらゆる実機などにカスタマイズして導入するすることができます。この技術をロボットに実装することで、これまで手作業で行っていたとされる工場などでのピックアップ作業を自動で行えるようになり、製造業全体での大幅な省力化とコストカットが期待できます。